

























![]()
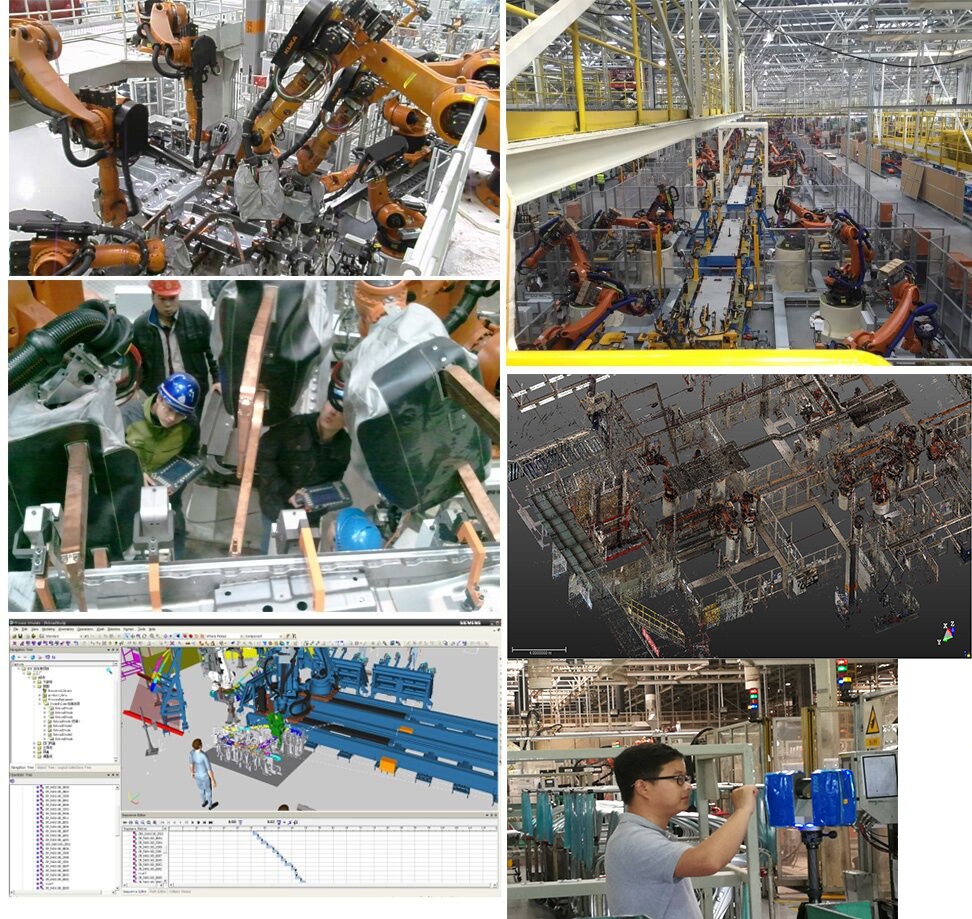
三维激光扫描技术主要利用激光测距原理来获取目标高精度立体三维点云数据。该技术是随空间点阵扫描技术和激光无反射棱镜长距离快测距技术发展而产生的一项崭新的革命性测绘技术,已广泛应用于野外地质测量勘测、桥梁结构测量、古建筑高精度模拟存储、公共服务等领域。
项目背景![]()

一汽-大众西南基地厂区成立于2009年,由冲压、焊装、涂装以及总装四大部分组成,目前主要进行速腾和捷达两款A级车的生产工作。从最初的5万辆到2016年的70万辆产能,一汽-大众西南基地既完成了量的飞跃,同时恪守着对质的坚持。随着时产量的提升,需要对原来的车间进行改造以适应新的形势,满足新的需求。
项目要求
1.对焊装车间进行扫描,获取车间现状点云,为后续的车间改造提供数据基础;
2.对扫描获得的数据进行拼接并删除与生产线无关的点云数据;
3.将焊装车间点云数据转换到大地坐标系,输出点云;
5.将设计的三维模型和点云三维模型导入到SIEMENS公司的Process系列软件进行对比和对车间进行虚拟改建。
工作流程
1.点云数据的获取
在开始扫描前熟悉工厂环境,进行扫描站点规划:设备及遮挡物比较少的区域安排扫描站点较少;设备复杂,遮挡物多,工作环境复杂区域,安排扫描站点较多。站点与站点间要布置三个(或三个以上)互相通视的白色标靶球,以便扫描后各站点数据的数据拼接。
![]()
2.对扫描获得的数据进行拼接
由于汽车焊装生产线设备复杂遮挡物多,所以需要多个位置进行扫描,才能得到汽车焊装生产线完整的点云数据。对各个扫描站点数据点云进行拼接才能实现不同坐标系点云数据整合到同一坐标系下。在RealWorks软件下,将不同测站的点云数据导入,通过相邻站点重叠点云比对,软件自动进行点云数据拼接,完成不同坐标系点云数据整合到同一坐标系。
![]()

图1 NF车型主线拼接点云
3.删除车间地面点云以及噪点
汽车焊装生产线设备较多,扫描点云数量庞大,含有大量的多余信息。通过对点的数据整理,消除噪点并删除与生产线无关的点云。
![]()

删除地面及噪点后的点云
4.为点云模型建立大地坐标系,输出点云
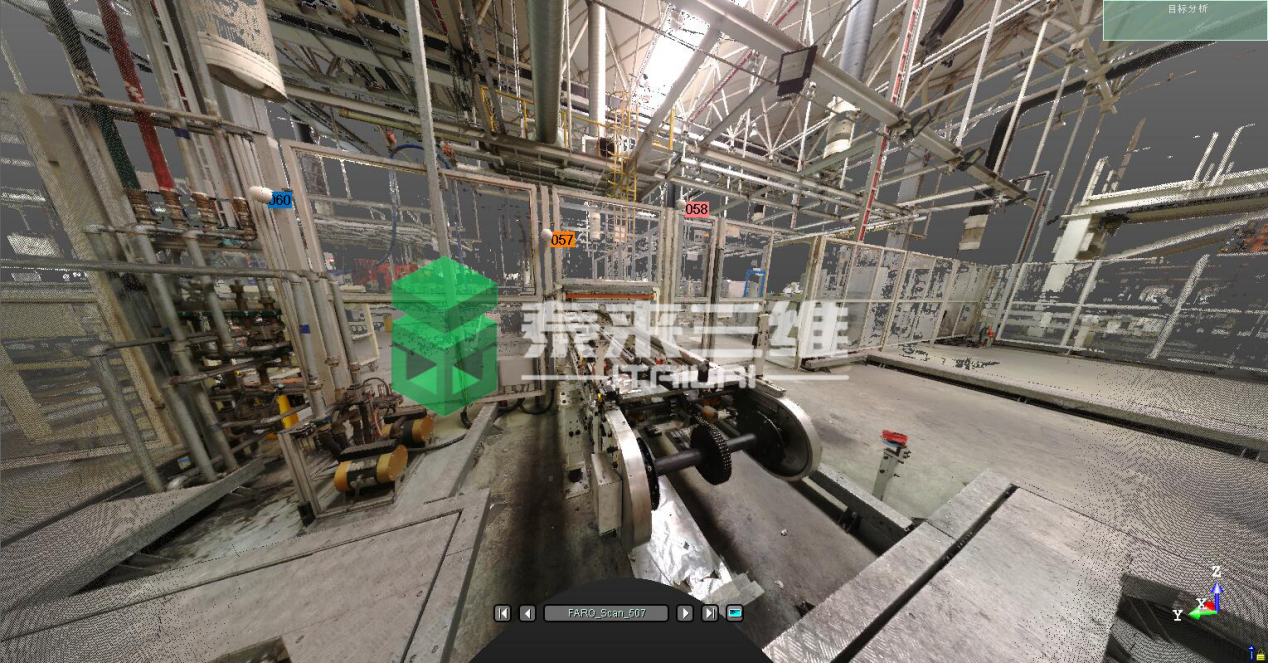
由于扫描出来的点云是测站坐标系,拼接完成之后的数据仍然是以某一站为基准的测站坐标系。所以,需要将坐标系转换到焊装车间的真实坐标。根据客户提供的轴网设计图纸,可以量测出每个柱子角点的坐标值,需要将这些坐标值赋予到点云中相应的位置去。首先,利用TRW软件中“目标分析器”功能下的“点目标(拐角)”工具,可以快速的提取点云中柱子的拐点,对于一次坐标转换,需要用到三个点。然后,利用配准下的“地理坐标转换”工具,为上步选取的目标赋予真实的坐标。最后导出点云。

![]()
5.按点云现状模型对设计设计模型进行调整、构建布局
先按照汽车焊装生产线设计平面图,对已有的三维CAD数据在SIEMENS公司Process Designer软件中进行布局,再将整合完成的点云数据导入SIEMENS公司的Process Simulate软件。由于产线设备存在安装误差和生产过程的位置误差,在Process Simulate软件中有许多设备位置与点云数据不一致。对与点云位置不一致的设备进行旋转、移动,使设备三维特征与设备点云特征重叠设备完成位置校准。车间会增加一些新设备,导入相关设备的设计模型,在软件中进行虚拟安装。
![]()
结语
本次三维激光扫描技术应用于汽车焊装生产线三维数字化工厂构建中,成功解决了原来以三维CAD数据为基础的数字化工厂构建技术不能确保工厂的产品、设备、水电气管及建筑结构构件完整性和准确性的问题。运用三维激光扫描技术在汽车制造领域可以用较短的时间、较少的费用构建三维工厂布局,有效对工厂、设备进行可视化管理,并且确保实际工厂的变更事项持续反映到原先被构建的三维数字化工厂。
声明:本网站部分的文章、图片及材料来源于互联网,如有侵权请联系撤删,谢谢!
 扫一扫关注官方微信
扫一扫关注官方微信