三维点云实物建模
1、地面测量型三维激光扫描仪进行厂区、车间数据扫描
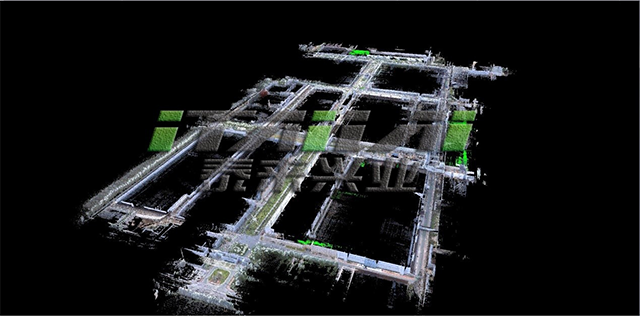
根据现场、设备形状和环境以及三维激光扫描仪的有效测程合理的布设扫描仪的架站点,然后在每个站点根据后续成图需求设置合适的分辨率进行扫描。在扫描过程中,可以通过架设标靶以提高后续点云拼接的精度。地面扫描我们采用的是FARO330和Trimble TX5。将全部站点的扫描数据导入到 Trimble Realworks软件中,执行自动拼接命令。 Trimble Realworks软件自动拼接命令完全不需要人为干预,可以简单、快捷的得到高精度的整体点云数据。
以下是车间和厂区的彩色点云:




2、车载移动三维激光扫描仪设备获取厂区整个室外三维点云数据
车载三维激光扫描仪是将三维激光扫描设备、卫星定位模块、惯性测量装置、里程计、360°全景相机、总成控制模块和高性能板卡计算机集成并封装于汽车的刚性平台之上,在汽车移动过程中,快速获取高精度定位定姿数据、高密度三维点云和高清连续全景影像数据,通过统一的地理参考和摄影测量解析处理,实现无控制的空间地理信息采集与建库。我们采用的车载是Topcon IP-S2移动测量系统:


3、无人机空中航测照片获取厂区空中三维模型点云数据
无人机是利用无线电遥控设备和自备的程序控制装置的不载人飞机,可以实时、动态、大量采集空间点云信息,可快速获取高密度、高精度的点云数据。无人机航测我们采用的是Motoar Sky MS-970,机身采用碳纤复合材料及钛合金连接件,翼臂可折叠,自轻量化,可搭配2D/3D云台,高负载挂接微单、专业单反、红外、激光雷达等多种传感器,地面站全程监控,一键起飞、悬停、返航遥控器、平板、三防笔记本多种控制方式。



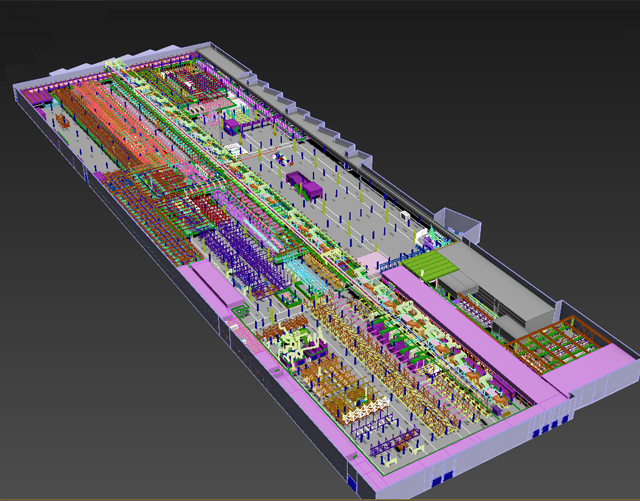
4、利用高精度测量设备获取的数据创建高精度三维实景模型
拼接、去噪处理后的点云在Trimble Realworks 和3Dmax软件中,根据点云进行厂区和车间的模型建立和贴图,以达到其真实性。以下是车间和厂区的部分模型:

声明:本网站部分的文章、图片及材料来源于互联网,如有侵权请联系撤删,谢谢!